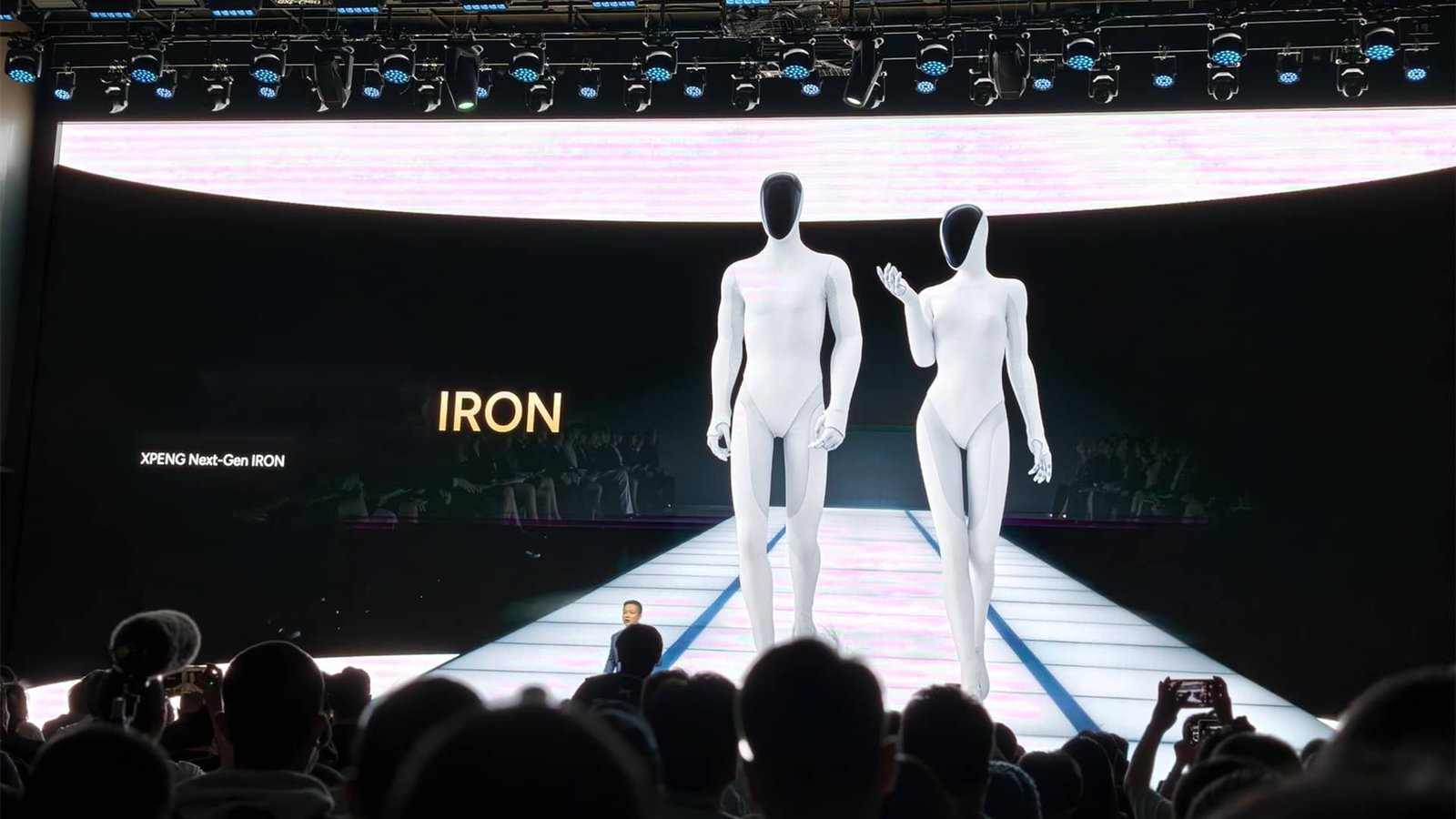
The emergence of the IRON robot marks a significant milestone in the evolution of humanoid robotics. Unveiled by XPENG at the company’s 2025 AI Day, IRON demonstrates a high level of anthropomorphic design, advanced hardware and AI integration, and a vision for real-world deployment in commercial and industrial environments.
🔧 Human-like Design: Anatomy and Mechanics
1. Physical dimensions & construction: The new-generation IRON retains human-scale proportions — around 178 cm tall and 70 kg.
2. Bionic skeleton-muscle-skin architecture: IRON employs a “skeleton–muscle–skin” structure that mimics human biomechanics. Its design includes a humanoid spine, artificial muscles, and a flexible synthetic outer skin — enabling more fluid, human-like motion and interactions.
3. Dexterous hands and articulation: Each hand offers a high degree of freedom (22 degrees of freedom in the latest version), allowing fine motor control — crucial for tasks like object manipulation, delicate handling, or interactive gestures.
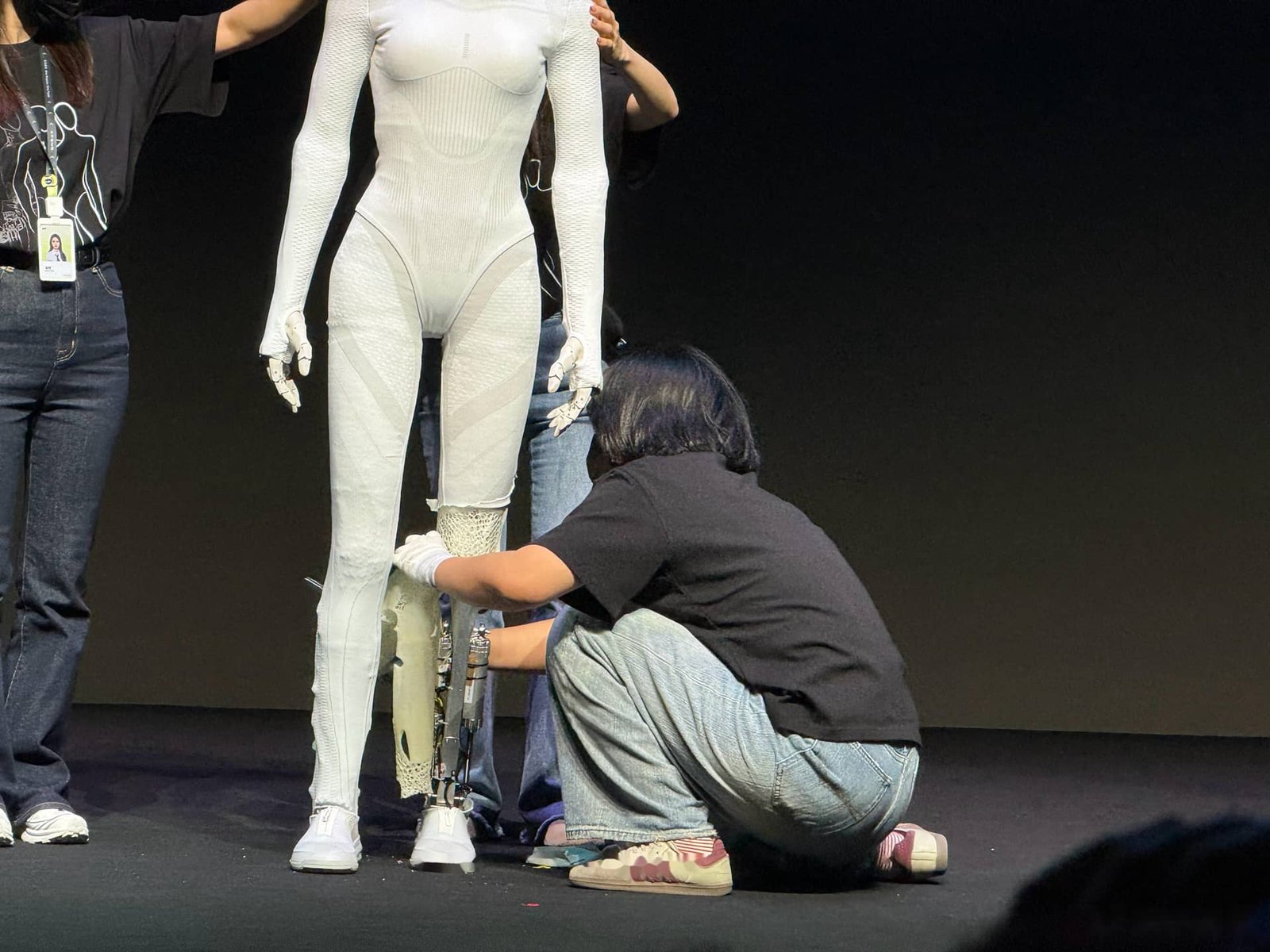
4. Mobility enhancements: By adding passive degrees of freedom at the toes and refining joint articulation, IRON achieves a gait and posture fluidity that impressed audiences — in fact, some observers initially doubted whether it was truly a robot or a human in a suit.
2. Bionic skeleton-muscle-skin architecture: IRON employs a “skeleton–muscle–skin” structure that mimics human biomechanics. Its design includes a humanoid spine, artificial muscles, and a flexible synthetic outer skin — enabling more fluid, human-like motion and interactions.
3. Dexterous hands and articulation: Each hand offers a high degree of freedom (22 degrees of freedom in the latest version), allowing fine motor control — crucial for tasks like object manipulation, delicate handling, or interactive gestures.
4. Mobility enhancements: By adding passive degrees of freedom at the toes and refining joint articulation, IRON achieves a gait and posture fluidity that impressed audiences — in fact, some observers initially doubted whether it was truly a robot or a human in a suit.
🧠 AI & Electronics: Brain, Perception, and Energy
1. In-house AI chips and computing power: IRON is powered by XPENG’s proprietary AI hardware. Reports indicate it utilizes three of the company’s “Turing” chips, delivering computing performance on the order of 2,250 TOPS (trillions of operations per second). This puts it among the more powerful humanoid robots in terms of onboard compute capacity.
2. Unified physical-world AI model: The robot runs on a physical-world foundation model that combines vision, language, and action capabilities (often described as VLA / VLM / VLT models). Through this architecture, IRON can perceive its environment, understand instructions (language + vision input), and execute appropriate actions — enabling tasks such as navigation, object interaction, and human-robot interaction in real time.
3. Energy system — solid-state battery: Departing from traditional lithium-ion packs, IRON uses a solid-state battery. This design choice aims to improve energy density, safety, and reduce weight — important for a humanoid robot intended to operate freely for extended periods.
2. Unified physical-world AI model: The robot runs on a physical-world foundation model that combines vision, language, and action capabilities (often described as VLA / VLM / VLT models). Through this architecture, IRON can perceive its environment, understand instructions (language + vision input), and execute appropriate actions — enabling tasks such as navigation, object interaction, and human-robot interaction in real time.
3. Energy system — solid-state battery: Departing from traditional lithium-ion packs, IRON uses a solid-state battery. This design choice aims to improve energy density, safety, and reduce weight — important for a humanoid robot intended to operate freely for extended periods.
🏭 Intended Use Cases & Deployment Strategy
XPENG has publicly outlined a phased rollout strategy for IRON:
1. Commercial & service environments first: Rather than positioning IRON immediately as a household robot or automotive replacement, XPENG plans to deploy the first batch in structured service settings — such as showrooms, museums, retail stores, or as receptionists and guides.
2. Industrial / inspection tasks: Through collaboration with large industrial partners (for example, a steel manufacturer), XPENG aims to test IRON in complex industrial applications such as inspection or facility operations — environments where human-like motion and perception offer advantages over conventional automation.
3. Mass production target by end of 2026: According to official statements, XPENG intends to begin large-scale production of IRON by the end of 2026 — marking a transition from demonstration to commercialization.
1. Commercial & service environments first: Rather than positioning IRON immediately as a household robot or automotive replacement, XPENG plans to deploy the first batch in structured service settings — such as showrooms, museums, retail stores, or as receptionists and guides.
2. Industrial / inspection tasks: Through collaboration with large industrial partners (for example, a steel manufacturer), XPENG aims to test IRON in complex industrial applications such as inspection or facility operations — environments where human-like motion and perception offer advantages over conventional automation.
3. Mass production target by end of 2026: According to official statements, XPENG intends to begin large-scale production of IRON by the end of 2026 — marking a transition from demonstration to commercialization.
🧩 IRON Advances & Challenges in Humanoid Robotics
Significance
- IRON exemplifies the shift from classical robotics (fixed-function robots, industrial arms, automation) toward embodied, general-purpose robots capable of operating in unstructured human environments with human-like flexibility. This could open opportunities in services, inspection, logistics, entertainment, and many other domains where robots must navigate and interact in human-centric spaces.
- The integration of high-performance AI, energy-efficient hardware (solid-state battery), and biomimetic body design makes IRON among the most advanced humanoid robots produced so far — advancing the frontier of “physical AI.”
Challenges
- Despite the impressive demo, real-world deployment remains non-trivial. Long-term reliability of complex joints, durability of soft skin and synthetic muscles, battery longevity, safety regulations, and maintenance costs are all significant hurdles.
- Commercial viability requires matching high performance with reasonable cost — especially if IRON is to be deployed at scale, whether in industry or service roles.
- Software side — generalizable AI models that allow versatile interaction, robust vision, safe decision-making, and context-aware behavior — remain an ongoing challenge, even with high compute power.

🔭 IRON’s Release Suggests for the Future
The unveiling of IRON signals several broader trends and possible future trajectories:
- From EV-maker to full-stack “Physical AI” company: XPENG is transitioning from strictly automotive manufacturing toward a broader vision encompassing robots, autonomous mobility, and AI-powered systems. IRON might be just the first step in a wider ecosystem.
- Humanoid robots entering commercial spaces within a few years: If XPENG’s timeline holds and mass production begins by end-2026, within the next 2–3 years we could see working humanoid robots performing useful tasks — potentially transforming service industries, manufacturing, and public spaces.
- Raising the bar for global robotics competition: As companies like XPENG push toward deploying realistic humanoid robots, the competition in robotics is likely to intensify — not just among legacy robotics firms, but also among automakers, AI companies, and new-generation startups.
IRON represents a bold leap forward in humanoid robotics — combining advanced mechanical design, human-level articulation, powerful AI, and a concrete path toward commercialization. While significant challenges remain, XPENG’s ambition to mass-produce and deploy humanoid robots by 2026 demonstrates growing confidence in the feasibility of “real-world robots.” If successful, IRON could become a key example of how human-like, autonomous machines transition from laboratories and prototypes into everyday environments.



[…] IRON: XPENG’s Cutting-Edge Humanoid Robot […]