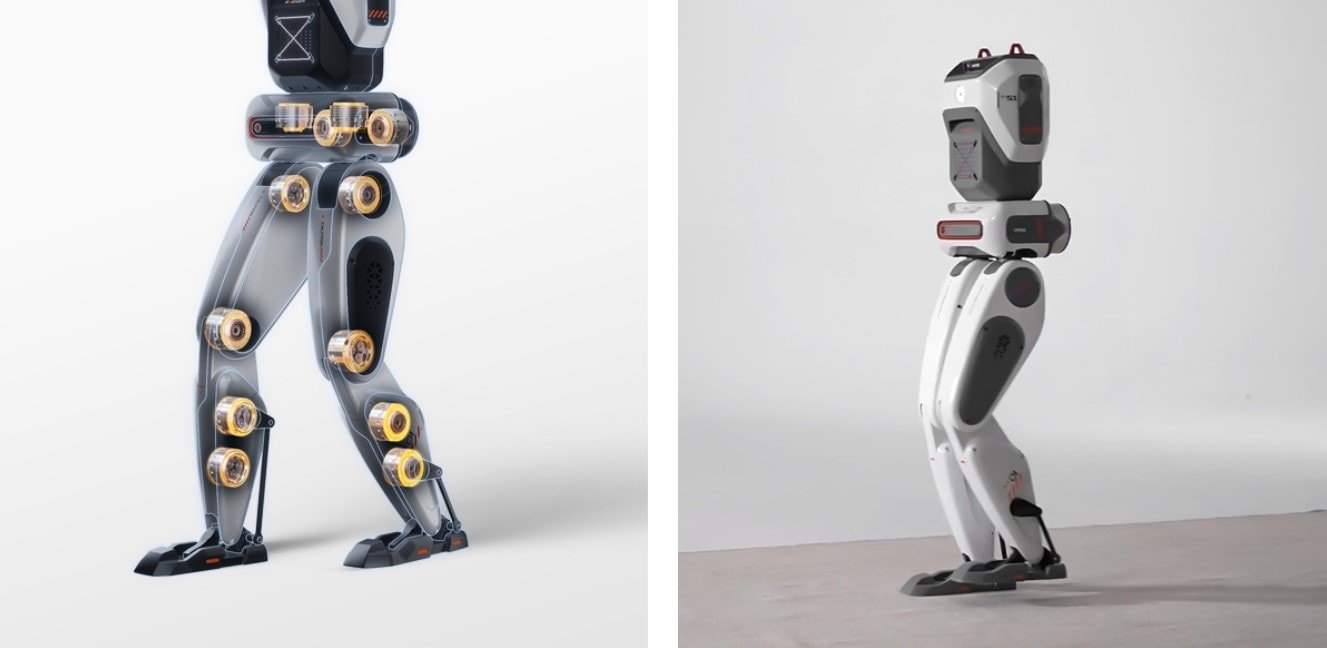
The ENGINEAI SA01 Bipedal Robot Platform represents a new generation of open-source biped robotics. Developed for research institutions, robotics developers, and advanced engineering teams, the SA01 integrates a fully open mechanical architecture, transparent motion-control algorithms, high-performance self-developed joints, and a robust aerospace-grade structural design. Its straight-knee gait, high freedom-of-motion legs, and modular expansion capability make it one of the most versatile biped systems available for next-generation humanoid research.
ENGINEAI SA01 Bipedal Robot Platform
1. Core Advantages at a Glance
SA01 Key Advantage Overview
Core Advantage
Description
Full Open-Source Design
Entire mechanical structure, interfaces, and software stack are openly accessible for secondary development.
12-DOF High Mobility
Six degrees of freedom per leg enable highly dynamic, stable, and human-like motion abilities.
Straight-Knee Gait Technology
Proprietary locomotion mechanics eliminate the traditional crouched gait seen in many humanoid robots.
High-Performance Joint Modules
Hip and knee joints deliver peak torque of 160 Nm, powered by fully self-developed actuators.
Aerospace-Grade Aluminum Exoskeleton
High-strength, lightweight structural frame protects internal electronics and enhances durability.
High-Capacity Quick-Swap Battery
15Ah 54.6V power system with rapid replacement for long experiment cycles.
2. Open-Source Architecture
2.1 Open Mechanical Platform
Feature
Details
Mechanical Openness
Full hardware structure and interface documentation available
The ENGINEAI SA01 Bipedal Robot Platform delivers a rare combination of complete openness, high mechanical performance, and real-world expandability. With a 12-DOF biped structure, straight-knee gait technology, aerospace-grade chassis, and fully transparent control stack, it is built for researchers and innovators who require a platform that does not limit exploration.