Robotics is entering a new era where machines are no longer confined to predictable factory floors. They are expected to navigate irregular terrain, react to uncertainty, and assist humans in dynamic environments. The Wheeled Bipedal Robot represents this shift. Designed with a blend of high-precision actuation, advanced balance intelligence, and adaptable motion forms, it bridges the gap between traditional mobile robots and next-generation embodied systems.
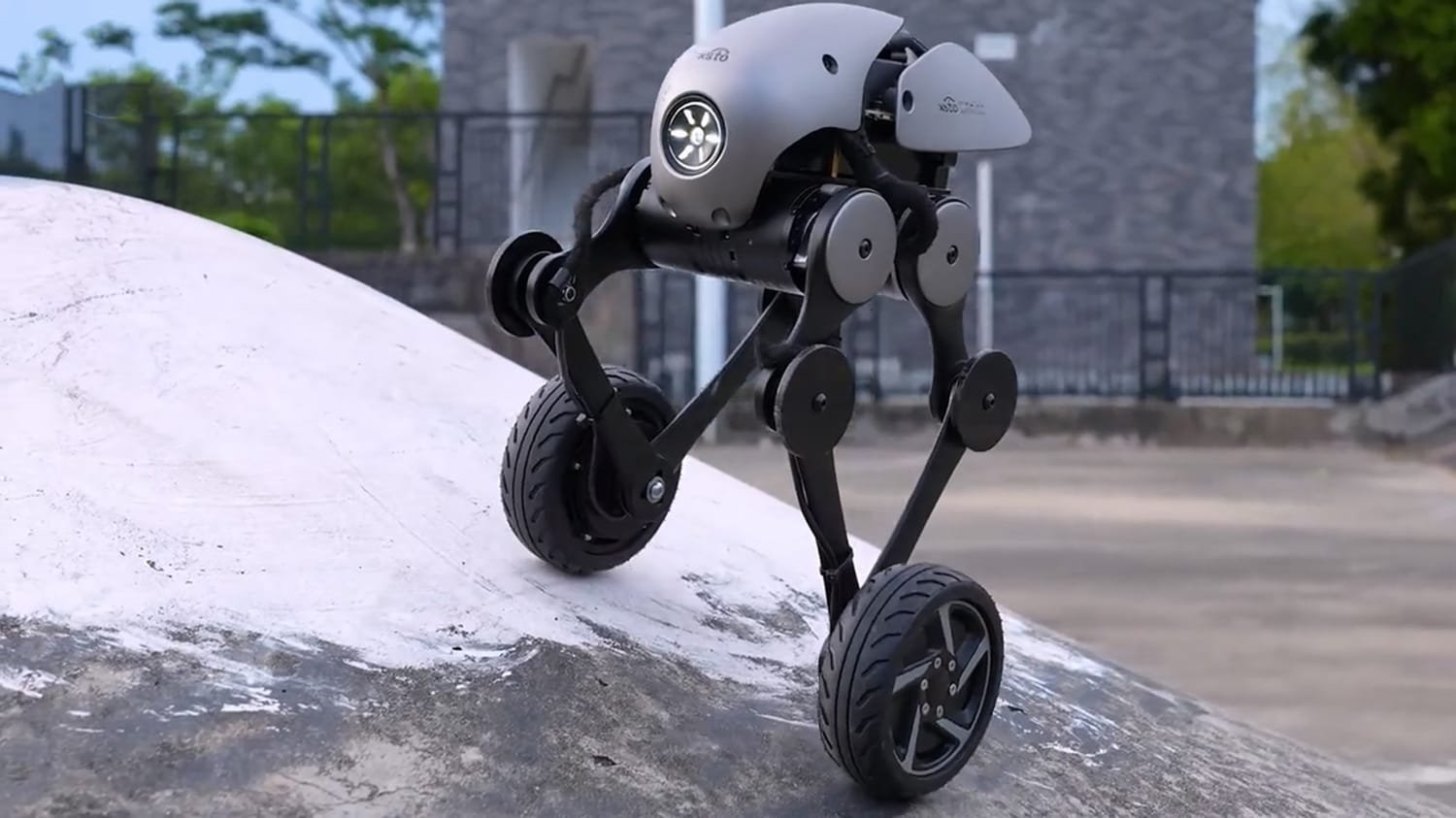
Engineered for all-terrain stability and fluid motion, Wheeled Bipedal Robot A7, comes from company Xdto. This robot delivers both agility and resilience—qualities essential for logistics, inspection, research, security, and custom industrial use cases.

A New Benchmark in Motion: Dual Mobility on Wheels and Legs
High-Performance Power Joints for Smooth, Responsive Control
At the core of the robot’s mobility is a set of high-performance power joints. Each joint is designed to execute rapid micro-adjustments, giving the robot a motion quality that is smooth, precise, and almost organic.
- 10 Control Nodes coordinate multi-joint movement with remarkable efficiency.
- 6 Independent Power Units provide consistent torque and real-time responsiveness across changing terrain.
The result is a machine that adapts instantly—accelerating, braking, shifting center of mass, and adjusting limb configuration without hesitation.
Master of Terrain: Built for Real-World Obstacles
Confident Navigation on Complex Surfaces
Whether in an industrial yard, a research lab, or outdoor test field, the robot maintains stability and traction across:
- Rocky surfaces
- Slopes and inclines
- Height differences or ledges
- Flat indoor flooring
- Grass and soft ground
- Gravel, sand, and loose stone
Its dynamic wheel-leg system absorbs shock while continuously redistributing balance. Uneven terrain, sudden gaps, or surface transitions are handled gracefully—without sacrificing speed or accuracy.

AI-Driven Balance Intelligence
Adaptive Stability Through Learning Algorithms
What truly distinguishes the Wheeled Bipedal Robot is its AI-enhanced balance control model. Built on a proprietary self-balancing framework, the system constantly evaluates posture, external forces, and movement patterns, learning how to optimize stability over time.
Even under strong impact, the robot maintains upright form and recovers immediately. This makes it ideal for unpredictable environments where bumps, drops, and collisions are unavoidable.
Customizable Platform for Research and Industry
Support for Secondary Development
Beyond its out-of-the-box capabilities, the robot is built as an open and expandable platform. Developers, research teams, and commercial partners can tailor the system to specific applications with:
- Custom sensors
- Additional cameras
- Extended perception modules
- Software-level customization and API integration
This modular approach enables rapid deployment across fields ranging from autonomous inspection to robotics education and AI-perception research.

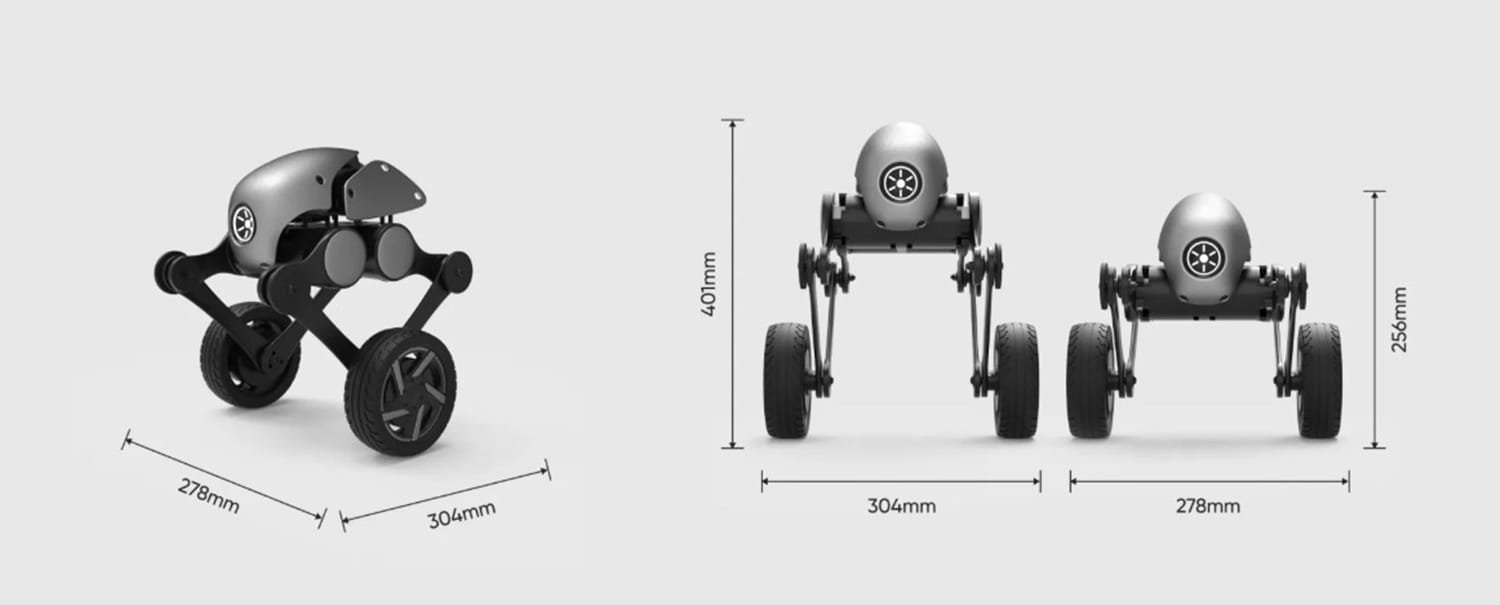
Performance Specifications
| Parameter | Specification |
|---|---|
| Total Weight | 5 kg |
| Battery Life | Up to 3 hours |
| Max Vertical Drop Resilience | 500 mm |
| Top Speed | 4 km/h |
| Jump Height | 150 mm |
| Adjustable Height Range | 260–360 mm |
All specifications are subject to the final product documentation provided at delivery.
Designed for Possibility: When the Path Becomes Clear
The Wheeled Bipedal Robot embodies a simple idea: navigating the world shouldn’t be limited by terrain. Whether rolling smoothly across a warehouse floor or balancing confidently on rocky outdoor ground, it is engineered to keep moving forward—making every direction a viable path.
In an age where mobility defines capability, this robot stands as a breakthrough in embodied intelligence, bridging versatility, precision, and adaptive learning in one compact machine.
About XSTO
XSTO, was founded in 2014! A world-leading expert in all-terrain mobile robots, and a provider of integrated mobile intelligent devices, integrating production and sales.
Main products: Mobility robots, all-terrain mobility robots, wheelchair-mounted stair climbers.